In questa sezione analizzeremo e approfondiremo i programmi realizzati con Visual C# in “Laborobotica”.
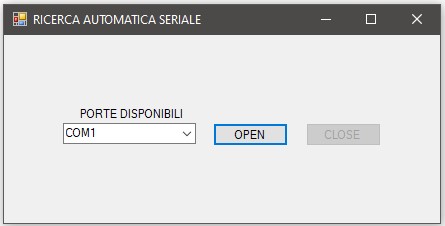
RICERCA AUTOMATICA DELLA SERIALE
Quando si utilizza Visual C# collegato via seriale con Arduino, ci si trova sempre a non dover conoscere la porta di connessione del microcontrollore. In questa lezione approfondiremo alcune righe di codice che, messe all’inizio di un qualsiasi nostro programma ci faciliteranno molto la vita, individuando tutte le porte seriali connesse e risparmiandoci inutili manovre attacca-stacca con Arduino.
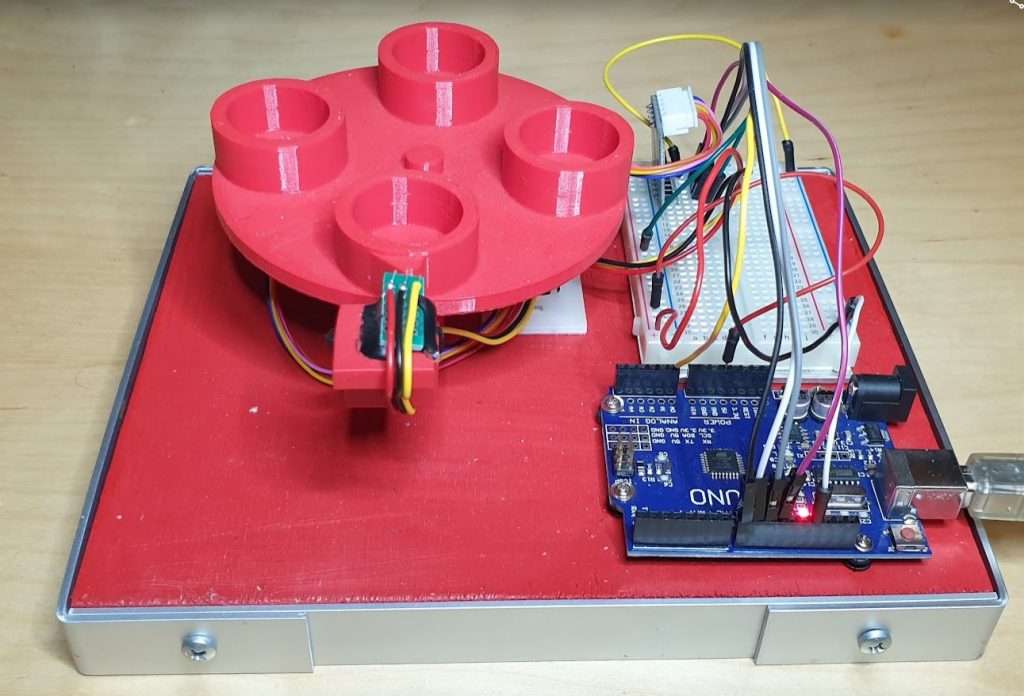
Terminata la fase di cattura con il braccio robotico, siamo in grado di prendere un oggetto dalla griglia posta davanti al manipolatore e depositarlo in un’area esterna da noi individuata (Vol. B, da pag. 22). Proviamo ora a progettare, con le competenze da noi acquisite nell’uso degli stepper motors (Vol.B, da pag 48) un sistema industriale, che ci permetterà di “caricare” degli oggetti dalla posizione sulla griglia a un contenitore rotondo a quattro posizioni. Dopo che il braccio robotico ha depositato l’oggetto nella prima posizione del contenitore, questo ruoterà di 90°, pronto ad accogliere un altro elemento. Il processo industriale terminerà quando tutte e quattro le posizioni saranno occupate. Per fare questo ci servirà una struttura come quella in figura composta da un Arduino Uno, una breadboard, un sensore magnetico di Hall, una calamita e due oggetti particolari stampati in 3D (in allegato alla scheda i file stl)
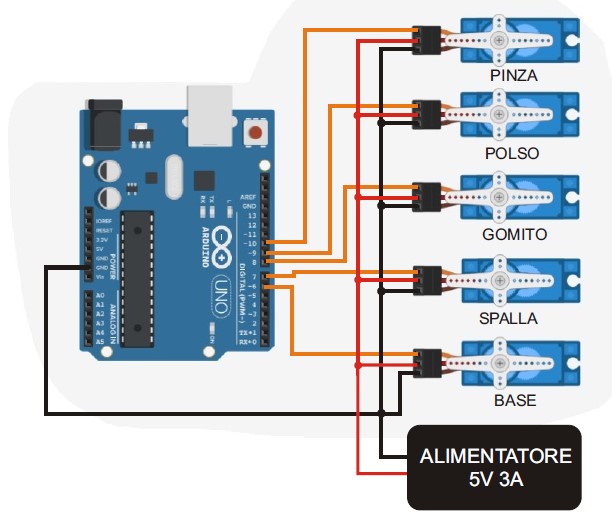
PILOTAGGIO DEL MANIPOLATORE CON ARDUINO, SENZA SSC32.
La scheda SSC32, pur essendo molto utile, è caratterizzata da un prezzo abbastanza elevato. Proviamo con Arduino a progettare un sistema di pilotaggio del manipolatore a basso prezzo.